Широтно-импульсная модуляция (ШИМ) – это метод преобразования сигнала, при котором изменяется длительность импульса (скважность), а частота остаётся константой. В английской терминологии обозначается как PWM (pulse-width modulation). В данной статье подробно разберемся, что такое ШИМ, где она применяется и как работает.
Область применения
С развитием микроконтроллерной техники перед ШИМ открылись новые возможности. Этот принцип стал основой для электронных устройств, требующих, как регулировки выходных параметров, так и поддержания их на заданном уровне. Метод широтно-импульсной модуляции применяется для изменения яркости света, скорости вращения двигателей, а также в управлении силовым транзистором блоков питания (БП) импульсного типа.
Широтно-импульсная (ШИ) модуляция активно используется в построении систем управления яркостью светодиодов. Благодаря низкой инерционности, светодиод успевает переключаться (вспыхивать и гаснуть) на частоте в несколько десятков кГц. Его работа в импульсном режиме воспринимается человеческим глазом как постоянное свечение. В свою очередь яркость зависит от длительности импульса (открытого состояния светодиода) в течение одного периода. Если время импульса равно времени паузы, то есть коэффициент заполнения – 50%, то яркость светодиода будет составлять половину от номинальной величины. С популяризацией светодиодных ламп на 220В стал вопрос о повышении надёжности их работы при нестабильном входном напряжении. Решение было найдено в виде универсальной микросхемы – драйвера питания, работающего по принципу широтно-импульсной или частотно-импульсной модуляции. Схема на базе одного из таких драйверов детально описана .
Подаваемое на вход микросхемы драйвера сетевое напряжение постоянно сравнивается с внутрисхемным опорным напряжением, формируя на выходе сигнал ШИМ (ЧИМ), параметры которого задаются внешними резисторами. Некоторые микросхемы имеют вывод для подачи аналогового или цифрового сигнала управления. Таким образом, работой импульсного драйвера можно управлять с помощью другого ШИ-преобразователя. Интересно, что на светодиод поступают не высокочастотные импульсы, а сглаженный дросселем ток, который является обязательным элементом подобных схем.
Масштабное применение ШИМ отражено во всех LCD панелях со светодиодной подсветкой. К сожалению, в LED мониторах большая часть ШИ-преобразователей работает на частоте в сотни Герц, что негативно отражается на зрении пользователей ПК.
Микроконтроллер Ардуино тоже может функционировать в режиме ШИМ контроллера. Для этого следует вызвать функцию AnalogWrite() с указанием в скобках значения от 0 до 255. Ноль соответствует 0В, а 255 – 5В. Промежуточные значения рассчитываются пропорционально.
Повсеместное распространение устройств, работающих по принципу ШИМ, позволило человечеству уйти от трансформаторных блоков питания линейного типа. Как результат – повышение КПД и снижение в несколько раз массы и размеров источников питания.
ШИМ-контроллер является неотъемлемой частью современного импульсного блока питания. Он управляет работой силового транзистора, расположенного в первичной цепи импульсного трансформатора. За счёт наличия цепи обратной связи напряжение на выходе БП всегда остаётся стабильным. Малейшее отклонение выходного напряжения через обратную связь фиксируется микросхемой, которая мгновенно корректирует скважность управляющих импульсов. Кроме этого современный ШИМ-контроллер решает ряд дополнительных задач, способствующих повышению надёжности источника питания:
- обеспечивает режим плавного пуска преобразователя;
- ограничивает амплитуду и скважность управляющих импульсов;
- контролирует уровень входного напряжения;
- защищает от короткого замыкания и превышения температуры силового ключа;
- при необходимости переводит устройство в дежурный режим.
Принцип работы ШИМ контроллера
Задача ШИМ контроллера состоит в управлении силовым ключом за счёт изменения управляющих импульсов. Работая в ключевом режиме, транзистор находится в одном из двух состояний (полностью открыт, полностью закрыт). В закрытом состоянии ток через p-n-переход не превышает несколько мкА, а значит, мощность рассеивания стремится к нулю. В открытом состоянии, несмотря на большой ток, сопротивление p-n-перехода чрезмерно мало, что также приводит к незначительным тепловым потерям. Наибольшее количество тепла выделяется в момент перехода из одного состояния в другое. Но за счёт малого времени переходного процесса по сравнению с частотой модуляции, мощность потерь при переключении незначительна.
Широтно-импульсная модуляция разделяется на два вида: аналоговая и цифровая. Каждый из видов имеет свои преимущества и схемотехнически может реализовываться разными способами.
Аналоговая ШИМ
Принцип действия аналогового ШИ-модулятора основан на сравнении двух сигналов, частота которых отличается на несколько порядков. Элементом сравнения выступает операционный усилитель (компаратор). На один из его входов подают пилообразное напряжение высокой постоянной частоты, а на другой – низкочастотное модулирующее напряжение с переменной амплитудой. Компаратор сравнивает оба значения и на выходе формирует прямоугольные импульсы, длительность которых определяется текущим значением модулирующего сигнала. При этом частота ШИМ равна частоте сигнала пилообразной формы.
Цифровая ШИМ
Широтно-импульсная модуляция в цифровой интерпретации является одной из многочисленных функций микроконтроллера (МК). Оперируя исключительно цифровыми данными, МК может формировать на своих выходах либо высокий (100%), либо низкий (0%) уровень напряжения. Однако в большинстве случаев для эффективного управления нагрузкой напряжение на выходе МК необходимо изменять. Например, регулировка скорости вращения двигателя, изменение яркости светодиода. Что делать, чтобы получить на выходе микроконтроллера любое значение напряжения в диапазоне от 0 до 100%?
Вопрос решается применением метода широтно-импульсной модуляции и, используя явление передискретизации, когда заданная частота переключения в несколько раз превышает реакцию управляемого устройства. Изменяя скважность импульсов, меняется среднее значение выходного напряжения. Как правило, весь процесс происходит на частоте в десятки-сотни кГц, что позволяет добиться плавной регулировки. Технически это реализуется с помощью ШИМ-контроллера – специализированной микросхемы, которая является «сердцем» любой цифровой системы управления. Активное использование контроллеров на основе ШИМ обусловлено их неоспоримыми преимуществами:
- высокой эффективности преобразования сигнала;
- стабильность работы;
- экономии энергии, потребляемой нагрузкой;
- низкой стоимости;
- высокой надёжности всего устройства.
Получить на выводах микроконтроллера ШИМ сигнал можно двумя способами: аппаратно и программно. В каждом МК имеется встроенный таймер, который способен генерировать ШИМ импульсы на определённых выводах. Так достигается аппаратная реализация. Получение ШИМ сигнала с помощью программных команд имеет больше возможностей в плане разрешающей способности и позволяет задействовать большее количество выводов. Однако программный способ ведёт к высокой загрузке МК и занимает много памяти.
Примечательно, что в цифровой ШИМ количество импульсов за период может быть различным, а сами импульсы могут быть расположены в любой части периода. Уровень выходного сигнала определяется суммарной длительностью всех импульсов за период. При этом следует понимать, что каждый дополнительный импульс – это переход силового транзистора из открытого состояния в закрытое, что ведёт к росту потерь во время переключений.
Пример использования ШИМ регулятора
Один из вариантов реализации ШИМ простого регулятора уже описывался ранее в . Он построен на базе микросхемы и имеет небольшую обвязку. Но, несмотря на простату схемы, регулятор имеет довольно широкую область применения: схемы управления яркости светодиодов, светодиодных лент, регулировка скорость вращения двигателей постоянного тока.
Читайте так же
Дорогой Бобот, не мог бы ты немного побольше рассказать об импульсах?
Хорошо, что ты попросил, дружище Бибот. Так как именно импульсы являются главными носителями информации в цифровой электронике, поэтому очень важно знать разные характеристики импульсов. Начнём, пожалуй, с одиночного импульса.
Электрический импульс - это всплеск напряжения или тока в определённом и конечном промежутке времени.
Импульс всегда имеет начало (передний фронт)
и конец (спад).
Ты уже наверняка знаешь, что в цифровой
электронике все сигналы могут быть представлены всего двумя
уровнями напряжения: "логической единицей" и "логическим
нулём". Это всего лишь условные величины напряжения.
"Логической единице" приписывается высокий уровень напряжения,
обычно около 2-3 вольт, "логическим нулём" считается близкое к нулю
напряжение. Цифровые импульсы графически изображаются
прямоугольными или трапециевидными по форме:
Главной величиной
одиночного импульса является его длина. Длина импульса - это
отрезок времени, в течение которого рассматриваемый логический
уровень имеет одно устойчивое состояние. На рисунке латинской
буквой t отмечена длина импульса высокого уровня, то есть
логической "1". Длина импульса измеряется в секундах, но чаще
в миллисекундах (мс), микросекундах (мкс) и даже наносекундах
(нс). Одна наносекунда - это очень короткий отрезок времени!
Запомни:
1 мс = 0,001 сек.
1 мкс = 0,000001 сек
1 нс
= 0,000000001 сек
Применяются также англоязычные
сокращения: ms - миллисекунда, μs - микросекунда, ns -
наносекунда.
За одну наносекунду я даже пикнуть не
успею!
Скажи, Бобот, а что произойдёт, если импульсов
будет много?
Хороший вопрос, Бибот! Чем больше
импульсов, тем больше информации можно ими передать. У
множества импульсов появляется много характеристик. Самая
простая - частота следования импульсов.
Частота
следования импульсов - это количество полных импульсов в
единицу времени.
За единицу времени принято брать одну
секунду. Единицей измерения частоты является герц, по имени
немецкого физика Генриха
Герца .
Один герц - это регистрация одного полного импульса
за одну секунду. Если произойдёт тысяча колебаний в секунду
будет 1000 герц, или сокращённо 1000 Гц, что равно 1
килогерцу, 1 кГц. Можно встретить и
англоязычное сокращение: Hz - Гц. Частота обозначается буквой
F
.
Существуют ещё несколько характеристик,
которые проявляются только при участии двух и более импульсов.
Одним из таких важных параметров импульсной последовательности
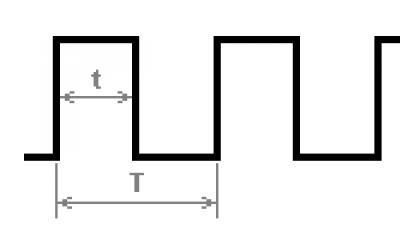
является период.
Период импульсов - это промежуток
времени, между двумя характерными точками двух соседних
импульсов.
Обычно период измеряют между двух фронтов или
двух спадов соседних импульсов и обозначают заглавной
латинской буквой T
.

Период следования
импульсов напрямую связан с частотой импульсной
последовательности, и его можно вычислить по формуле:
T=1/F
Если длина
импульса t
точно равна половине периода T
, то
такой сигнал часто называют "меандр
".
Скважностью импульсов называется отношение периода
следования импульсов к их длительности и обозначается буквой
S:
S=T/t
Скважность -
безразмерная величина и не имеет единиц измерения, но может
быть выражена в процентах. Часто в англоязычных текстах
встречается термин Duty cycle, это так называемый
коэффициент заполнения.
Коэффициент заполнения D
является величиной, обратной скважности.
Коэффициент
заполнения обычно выражается в процентах и вычисляется по
формуле:
D=1/S
Дорогой Бобот, так много разного и интересного у простых импульсов! Но потихоньку я уже начинаю путаться.
Дружище, Бибот, это ты верно заметил, импульсы - не так уж и просты! Но осталось совсем чуть-чуть.
Если ты меня внимательно слушал, то ты мог заметить, что если увеличивать или уменьшать длину импульса и при этом на столько же уменьшать или увеличивать паузу между импульсами, то период следования импульсов и частота останется неизменной! Это очень важный факт, который нам ещё не раз понадобится в будущем.
Но
сейчас ещё хочется добавить другие способы передачи информации
с помощью импульсов.
Например, можно несколько импульсов
объединить в группы. Такие группы с паузами определённой длины
между ними называют пачками или пакетами. Генерируя разное
число импульсов в группе и варьируя его, можно также
передавать какую-либо информацию.

Для передачи информации в
цифровой электронике (ещё её называют дискретной электроникой)
можно использовать два и более проводников или каналов с
разными импульсными сигналами. При этом информация передаётся
с учётом определённых правил. Такой метод позволяет заметно
увеличить скорость передачи информации или добавляет
возможность управлением потоком информации между различными
схемами.
Перечисленные возможности передачи информации
с помощью импульсов могут быть использованы как сами по себе
раздельно, так и в комбинации между собой.
Существуют также множество стандартов передачи информации с помощью
импульсов, например I2C, SPI, CAN, USB, LPT.
в идеале метод, использующий широтно-импульсную модуляцию (ШИМ), является ответом на поиски практически совершенного стабилизированного источника питания. Мы уже говорили, что в импульсном источнике ключ либо включен, либо выключен и управление осуществляется с нулевым рассеянием мощности, в отличие от линейного стабилизатора, где стабилизация происходит из-за рассеяния мощности в проходном элементе. В реальных условиях, широтно-импульсная модуляция дает разумный подход к переключению без потерь за счет более низкой частоты переключения, например, в диапазоне 20 – 40 кГц. Глядя на ситуацию с другой стороны, может сказать, почему этот частотный диапазон так долго был популярен.
От самого начала стабилизации с помощью ШИМ, конструкторы пытались продвигаться в сторону более высоких частот, поскольку при этом можно уменьшить размеры, вес и стоимость магнитного сердечника и конденсаторов фильтра. При высокой частоте переключения появляются и другие преимущества. Используя более высокие частоты можно ожидать уменьшение радиопомех и электромагнитных шумов; можно ожидать меньших проблем при экранировке, развязке, изоляции и ограниче-
НИИ в схеме. Можно также ожидать более быстрого срабатывания, а также снижения выходного сопротивления и величины пульсаций.
Главным препятствием на пути применения более высоких частот были практические трудности создания быстрых и достаточно мощных переключателей. Из-за того, что невозможно достичь мгновенного включения и выключения коммутатора, на нем во время переключения имеется напряжение и одновременно через него протекает ток. Другими словами, трапецеидальные, а не прямоугольные колебания характеризуют процесс переключения. Это, в свою очередь, приводит к потерям переключения, которые сводят на нет теоретически высокий к.п.д. идеального коммутатора, который мгновенно включается, имеет нулевое сопротивление во включенном состоянии и мгновенно выключается. На рис. 18.2 сравнивается ШИМ и режим переключения в резонансном режиме, который будет рассмотрен подробнее.
Рис. 18.2. Осциллограммы, показывающие разницу между ШИМ и резонансным режимом. При ШИМ потери переключения появляются из-за одновременного протекания тока через коммутатор и наличия напряжения на нем. Обратите внимание, что эта ситуация отсутствует при резонансном режиме работы, который для стабилизации напряжения использует частотную модуляцию (ЧМ).
Из вышесказанного очевидно, что на идеальном переключателе не должно быть никакого падения напряжения во время включенного состояния. Все эти рассуждения говорят о том, что высокий к.п.д. был трудно достижимой задачей, особенно при высоких частотах переключения до тех пор, пока не был достигнут прогресс в создании импульсных полупроводниковых приборов. Следует указать также, что одновременно был необходим прогресс в создании других устройств, таких как диоды, трансформаторы и конденсаторы. Надо отдать должное работникам всех областей техники за то, что частота переключения при использовании широтно-импульсной модуляции была повышена до 500 кГц. Тем не менее, на высоких частотах, скажем на частоте 150 кГц, лучше рассмотреть другой метод. Итак, мы приходим к резонансному режиму работы источника питания.
Стабилизированный источник питания, использующий резонансный режим, действительно представляет собой большой скачок вперед в развитии технологии. Хотя надо сказать, что использование резонансных явлений в инверторах, преобразователях и источниках питания предшествует эре полупроводников. Оказалось, что при использовании резонансных явлений часто удавалось получить хорошие результаты. Например, в первых телевизорах необходимые высокие напряжения для кинескопа получали с помощью радиочастотного источника питания. Это был работающий на частоте от 150 до 300 кГц генератор синусоидальных колебаний на электронной лампе, в котором повышение переменного напряжения достигалось в резонансном радиочастотном трансформаторе. По существу подобные схемы все еще используются для создания напряжений, по крайней мере, несколько сотен тысяч вольт для различных промышленных и научно-исследовательских целей. Более высокие напряжения часто достигаются благодаря совместному применению резонансного режима работы и диодного умножителя напряжения.
Также давно было известно, что резонансные выходные цепи инвертора стабилизируют работу электродвигателей и сварочного оборудования. Обычно в разрыв провода, ведущего от источника постоянного напряжения к инвертору, включалась катушка с большой индуктивностью. При этом инвертор ведет себя по отношению к нагрузке как источник тока, что дает возможность легче удовлетворить условию существования резонансных явлений. В этом случае существующие тиристорные инверторы правильнее назвать квазирезонансными - колебательный контур периодически подвергается ударному возбуждению, но непрерывные колебания отсутствуют. Между импульсами возбуждения, колебательный контур отдает запасенную энергию в нагрузку. Примеры упоминавшихся схем приведены на рис. 18.3, 18.4 и 18.5.
Из сказанного выше должно бьггь ясно, что широкое использование резонансного режима работы началось после создания специализированных ИС управления. Эти ИС освободили конструкторов от проблем со сбоями, которые неизбежно сопутствуют стремлению использовать резонансный режим на частотах несколько сот килогерц ити несколько МГц, где малые размеры компонент могут дать заметное сокращение габаритов, веса и стоимости.

Рис. 18.3. Пример резонансного высоковольтного источника, работающего в радиочастотном диапазоне. Это восстановленная старая схема использует электронные лампы в генераторе Мейснера. Рабочая частота определяется повышающей обмоткой Z1 и ее собственной распределенной емкостью. Никакой стабилизации частоты не предусматривается.

Рис. 18.4. Пример запускаемого током инвертора с резонансным контуром на выходе. Обратите внимание на присутствие катушки с большой индуктивностью L в цепи питания и конденсатора, входящего в состав резонансного контура на выходе. Подобный метод применим и к инверторам с самовозбуждением. Эти схемы обычно не имеют стабилизации.

Рис. 18.5. Пример квази-резонансного инвертора с одним тиристором. Выбирая соответствующий тиристор, можно получить выходную мощность нескольких киловатт и частоту переключения около 30 кГц. Если частота пульсаций немного ниже резонансной частоты последовательного XС-контура, то на нагрузке будет хорошее синусоидальное напряжение. Стабилизация в схеме отсутствует. General Electric Semiconductor Products Dept.
Интересно, что резонансный стабилизатор напряжения имеет много общего с давно популярной схемой широтно-импульсной модуляции (ШИМ). Действительно, согласно структурной схеме, источник импульсов постоянной длительности и переменной частоты вместе с резонансным «контуром» используется вместо схемы ШИМ. В процессе работы из-за наличия ZС-контура через коммутатор или протекает ток, или к нему приложено напряжение, имеющие форму отрезков синусоиды. Форма сигналов при переключении, в отличие от высокочастотных ШИМ схем, такова, что никогда не бывает одновременного присутствия напряжения на коммутаторе и протекания через него тока. Поэтому потери коммутации пренебрежимо малы даже при высоких частотах.
Рис. 18.6 иллюстрирует резонансный режим работы. Сигнал ошибки получен также, как в источниках питания с ШИМ, то есть как разность между выходным и опорным напряжениями. Это напряжение рассогласования поступает на генератор, управляемый напряжением, выходной сигнал которого запускает ждущий мультивибратор. Схема модуляции, по существу, является преобразователем напряжение – частота. Импульсы ждущего мультивибратора, имеющие фиксированную длительность и переменную частоту повторения, поступают на вход коммутато-ра(ов). Часто на выходе ждущего мультивибратора включают усилитель мощности, чтобы обеспечить более высокое мгновенное значение тока и низкое сопротивление. В качестве коммутаторов обычно применяется один или два мощных МОП-транзистора.
Выход коммутатора(ов) связан с резонансным Z С-контуром и выходным трансформатором. Видно, что амплитуда почти синусоидального напряжения, приложенного к первичной обмотке трансформатора, зависит от близости резонансной частоты ZС-контура к величине, обратной фиксированной длительности импульсов переменной частоты, поступающих от коммутатора. Таким образом, стабилизацию постоянного выходного напряжения можно реализовать с помощью частотной модуляции. Слишком высокая добротность Z С-контура будет препятствовать выделению мощности, а очень низкая вызовет чрезмерно большие пиковые значения тока в коммутаторе.

Рис. 18.6. Упрощенная схема резонансного стабилизированного источника питания. В первом приближении можно считать, что здесь вместо широтно-импульсного модулятора в популярном ШИМ стабилизаторе применен преобразователь напряжение – частота.
Резонансный режим может быть получен разными путями: можно использовать или последовательный, или параллельный L С-контур. А номинальная рабочая частота может быть как ниже, так и выше собственной резонансной частоты Z С-контура. В любом случае стабилизация требует работы на падающем участке резонансной кривой. На рис. 18.6, индуктивность первичной обмотки выходного трансформатора достаточно высока, так что практически не влияет на резонансную частоту Z С-контура.
Для того, чтобы избежать недоразумений из-за неаккуратных высказываний в технической литературе, хорошо бы вспомнить следующие факты, относящиеся к резонансным стабилизаторам:
В резонансном Z С-контуре колебания всегда происходят на его резонансной частоте независимо от частоты импульсов, с помощью которых осуществляется ударное возбуждение. Однако в большинстве случаев условия для существования свободных колебаний отсутствуют. На схему выпрямителя поступают полупериоды синусоидального колебания.
Одна из наиболее популярных схем использует последовательный резонансный контур, в котором выходную мощность получают от конденсатора через высокоомную первичную обмотку выходного трансформатора. Такой источник соответственно называется преобразователем или стабилизатором с последовательным резонансом и параллельной нагрузкой. К сожалению, иногда об этих устройствах говорят как о схемах с параллельным резонансом (рис. 18.7В).
В идеале существует два способа получения почти нулевых потерь при коммутации. Один с переключением при нулевом токе, который является наиболее популярным и допускает работу с частотами около 2 МГц, а другой с переключением при нулевом напряжении, позволяющий работать на частоте до 10-МГц. Переключение при нулевом токе использует для ударного возбуждения контура импульсы постоянной длительности и переменной частотой повторения. Фиксированный интервал времени между импульсами используются в режиме переключения с нулевым напряжением.
Чаще всего (особенно при переключении с нулевым током) диапазон изменения частоты распространяется от низких частот до 80 % от резонансной частоты контура. Это обеспечивает время, достаточное для того, чтобы ток катушки индуктивности уменьшился до нуля или стал отрицательным. Импульс, определяющий время включенного состояния.
заканчивается, когда ток принимает отрицательное значение; момент его окончания не очень критичен. Отрицательный ток катушки индуктивности подразумевает, что ток теперь течет не через мощный МОП-транзистор, а через фиксирующий диод. Длительность импульса определяется RC-цепью, подключенной к управляющей ИС. Величины R и С удобно определять по графикам, предоставляемым изготовителем ИС. Типичные данные, иллюстрирующие выбор величины RC для определения длительности импульса, а также частоты генератора показаны на рис. 18.8.


Рис. 18.8. Примеры графиков для определения параметров резонансного стабилизированного источника. Эти кривые соответствуют ИС GP605, но типичны для схем других изготовителей. (А) Допустимые комбинации емкости и сопротивления в зависимости от максимальной частоты генератора. (В) Допустимая емкость в зависимости от минимальной частоты генератора. (С) Комбинация резистора и емкости для выбранной длительности импульса. В зависимости от того, имеем дело со схемой А или В, ЛС-цепи будут разными. Gennum Соф.
Надо быть уверенным, что «частота переключения» соответствует частоте, с которой импульсы поступают на резонансный контур. Не обязательно это частота генератора в управляющей ИС. В двухтактном импульсном источнике питания частота генератора будет вдвое выше частоты переключений. Для однотактных ИИП эти частоты обычно совпадают.
К переключению без потерь приближается источник, работающий в прерывистом режиме. Это просто означает, что на каждый импульс должен быть только один период колебаний в Z С-контуре. Практически это требует наличия «мертвого времени» между завершением одного цикла колебания и появлением следующего импульса. Вот почему частота повторения импульсов не должна приближаться к резонансной частоте
LC-контура. Удоалетворсние этого требования приводит к некоторому уменьшению выходной мощности.
Стабилизация основана на том, что энергия, запасенная в? С-контуре максимальна, когда частота повторения импульсов, осуществляющих ударное возбуждение ZC-контура, близка к его резонансной частоте. Отклонение частоты импульсов от этого оптимального условия, приводит к тому, что будет получена меньшая мощность. Поскольку резонансная частота остается постоянной, то для осуществления стабилизации изменяется упомянутое выше «мертвое время».
В резонансные источники питания часто вводят защиту по току, что делает их похожими на источники с ШИМ, имеющими такую защиту. Действительно, можно найти ссылку на работу резонансного источника S режиме ограничения тока. Однако имеется существенное отличие. В системе с ШИМ учитывается нарастание тока, и ограничение максимального тока источника происходит в любой момент в пределах всего цикла. В резонансном источнике, учитывается часть синусоидального колебания; это допускает ограничение максимального тока ИИП, но не мгновенно. 8 обоих случаях доспигается защита, но в резонансных источниках не так быстро или точно, как в источниках с ШИМ, имеющих токовую защиту. В источниках с ШИМ слежение за величиной тока реализует стабилизацию с прямой связью; в резонансных источниках считы-ватше величины тока приводит к использованию метода выключения.
Последнее, но самое существенное, коммутаторы в резонансных ИИП не испытывают одновременного воздействия напряжения и тока во время процесса переключения. Это приводит к высокому к.п.д. со значительным уменьшением р^ассеиваемой мощности в коммутаторах, что в свою О’щ^едь ©сдабляет температурные ароблемы, сптеобствуя высокой плотности компоновки элементов.
ШИМ или PWM (широтно-импульсная модуляция, по-английски pulse-width modulation) – это способ управления подачей мощности к нагрузке. Управление заключается в изменении длительности импульса при постоянной частоте следования импульсов. Широтно-импульсная модуляция бывает аналоговой, цифровой, двоичной и троичной.
Применение широтно-импульсной модуляции позволяет повысить КПД электрических преобразователей, особенно это касается импульсных преобразователей, составляющих сегодня основу вторичных источников питания различных электронных аппаратов. Обратноходовые и прямоходовые однотактные, двухтактные и полумостовые, а также мостовые импульсные преобразователи управляются сегодня с участием ШИМ, касается это и резонансных преобразователей.
Широтно-импульсная модуляция позволяет регулировать яркость подсветки жидкокристаллических дисплеев сотовых телефонов, смартфонов, ноутбуков. ШИМ реализована в , в автомобильных инверторах, в зарядных устройствах и т. д. Любое зарядное устройство сегодня использует при своей работе ШИМ.
В качестве коммутационных элементов, в современных высокочастотных преобразователях, применяются биполярные и полевые транзисторы, работающие в ключевом режиме. Это значит, что часть периода транзистор полностью открыт, а часть периода - полностью закрыт.
И так как в переходных состояниях, длящихся лишь десятки наносекунд, выделяемая на ключе мощность мала, по сравнению с коммутируемой мощностью, то средняя мощность, выделяемая в виде тепла на ключе, в итоге оказывается незначительной. При этом в замкнутом состоянии сопротивление транзистора как ключа очень невелико, и падение на нем напряжения приближается к нулю.
В разомкнутом же состоянии проводимость транзистора близка к нулю, и ток через него практически не течет. Это позволяет создавать компактные преобразователи с высокой эффективностью, то есть с небольшими тепловыми потерями. А резонансные преобразователи с переключением в нуле тока ZCS (zero-current-switching) позволяют свести эти потери к минимуму.

В ШИМ-генераторах аналогового типа, управляющий сигнал формируется аналоговым компаратором, когда на инвертирующий вход компаратора, например, подается треугольный или пилообразный сигнал, а на неинвертирующий - модулирующий непрерывный сигнал.
Выходные импульсы получаются , частота их следования равна частоте пилы (или сигнала треугольной формы), а длительность положительной части импульса связана с временем, в течение которого уровень модулирующего постоянного сигнала, подаваемого на неинвертирующий вход компаратора, оказывается выше уровня сигнала пилы, который подается на инвертирующий вход. Когда напряжение пилы выше модулирующего сигнала - на выходе будет отрицательная часть импульса.

Если же пила подается на неинвертирующий вход компаратора, а модулирующий сигнал - на инвертирующий, то выходные импульсы прямоугольной формы будут иметь положительное значение тогда, когда напряжение пилы выше значения модулирующего сигнала, поданного на инвертирующий вход, а отрицательное - когда напряжение пилы ниже сигнала модулирующего. Пример аналогового формирования ШИМ - микросхема TL494, широко применяющаяся сегодня при построении импульсных блоков питания.

Цифровая ШИМ используются в двоичной цифровой технике. Выходные импульсы также принимают только одно из двух значений (включено или выключено), и средний уровень на выходе приближается к желаемому. Здесь пилообразный сигнал получается благодаря использованию N-битного счетчика.
Цифровые устройства с ШИМ работают также на постоянной частоте, обязательно превосходящей время реакции управляемого устройства, этот подход называется передискретизацией. Между фронтами тактовых импульсов, выход цифрового ШИМ остается стабильным, или на высоком, или на низком уровне, в зависимости от текущего состояния выхода цифрового компаратора, который сравнивает уровни сигналов на счетчике и приближаемый цифровой.
Выход тактуется как последовательность импульсов с состояниями 1 и 0, каждый такт состояние может сменяться или не сменяться на противоположное. Частота импульсов пропорциональна уровню приближаемого сигнала, а единицы, следующие друг за другом могут сформировать один более широкий, более продолжительный импульс.
Получаемые импульсы переменной ширины будут кратны периоду тактования, а частота будет равна 1/2NT, где T – период тактования, N – количество тактов. Здесь достижима более низкая частота по отношению к частоте тактования. Описанная схема цифровой генерации - это однобитная или двухуровневая ШИМ, импульсно-кодированная модуляция ИКМ.
Эта двухуровневая импульсно-кодированная модуляция представляет собой по сути серию импульсов с частотой 1/T, и шириной Т или 0. Для усреднения за больший промежуток времени применяется передискретизация. Высокого качества ШИМ позволяет достичь однобитная импульсно-плотностная модуляция (pulse-density-modulation), называемая также импульсно-частотной модуляцией.
При цифровой широтно-импульсной модуляции прямоугольные подимпульсы, которыми оказывается заполнен период, могут приходиться на любое место в периоде, и тогда на среднем за период значении сигнала сказывается только их количество. Так, если разделить период на 8 частей, то комбинации импульсов 11001100, 11110000, 11000101, 10101010 и т. д. дадут одинаковое среднее значение за период, тем не менее, отдельно стоящие единицы утяжеляют режим работы ключевого транзистора.

Корифеи электроники, повествуя о ШИМ, приводят такую аналогию с механикой. Если при помощи двигателя вращать тяжелый маховик, то поскольку двигатель может быть либо включен, либо выключен, то и маховик будет либо раскручиваться и продолжать вращаться, либо станет останавливаться из-за трения, когда двигатель выключен.
Но если двигатель включать на несколько секунд в минуту, то вращение маховика будет поддерживаться, благодаря инерции, на некоторой скорости. И чем дольше продолжительность включения двигателя, тем до более высокой скорости раскрутится маховик. Так и с ШИМ, на выход приходит сигнал включений и выключений (0 и 1), и в результате достигается среднее значение. Проинтегрировав напряжение импульсов по времени, получим площадь под импульсами, и эффект на рабочем органе будет тождественен работе при среднем значении напряжения.
Так работают преобразователи, где переключения происходят тысячи раз в секунду, и частоты достигают единиц мегагерц. Широко распространены специальные ШИМ-контроллеры, служащие для управления балластами энергосберегающих ламп, блоками питания, и т. д.

Отношение полной длительности периода импульса ко времени включения (положительной части импульса) называется скважностью импульса. Так, если время включения составляет 10 мкс, а период длится 100 мкс, то при частоте в 10 кГц, скважность будет равна 10, и пишут, что S = 10. Величина обратная скважности называется коэффициентом заполнения импульса, по-английски Duty cycle, или сокращенно DC.
Так, для приведенного примера DC = 0.1, поскольку 10/100 = 0.1. При широтно-импульсной модуляции, регулируя скважность импульса, то есть варьируя DC, добиваются требуемого среднего значения на выходе электронного или другого электротехнического устройства, например двигателя.
Широтно-импульсная модуляция состоит в изменении ширины (длительности) импульсов, следующих друг за другом с постоянной частотой. Широтно-импульсная модуляция (ШИМ, англ. Pulse-width modulation (PWM)) - приближение желаемого сигнала (многоуровневого или непрерывного) действительным бинарным (с двумя уровнями - вкл/выкл), так что в среднем, за отрезок времени, их значения равны. Основным регулирующим фактором выступает относительная длительность импульсов или коэффициент заполнения
где Т – период следования импульсов. При односторонней ШИМ, опорное напряжение представляет собой периодические пилообразные колебания. В этом случае модуляция осуществляется изменением положения только одного фронта импульса. Для двусторонней ШИМ, требуется треугольное (желательно равностороннее) опорное напряжение. Двусторонняя ШИМ, обладает более высоким быстродействием, чем односторонняя, поэтому ее применяют чаще. Если входной сигнал – биполярный, то должны меняться полярность и среднее значение выходного напряжения. При этом возможны два типа модуляции разнополярная ШИМ и однополярная ШИМ.
1. Формулировка задания
В данной курсовой работе разрабатывается широтно-импульсный модулятор со следующими параметрами:
Таблица 1. Содержание задания
2. Разработка функциональной схемы устройства
Рассмотрим функциональную схему и принцип работы устройства.
 |
Рисунок 1 – Функциональная схема
Генератор прямоугольных импульсов необходим для образования импульсов на следующем блоке – ГЛИНе.
Исходя из задания, определяем, что в качестве опорного напряжения должны быть «треугольники». На выходе ГЛИНа имеем треугольные импульсы, которые являются тем самым опорным напряжением, подаваемым на компаратор.
Компаратор устройство, на отрицательный вход которого подаётся опорный сигнал в виде треугольников, а на положительный − модулируемый непрерывный аналоговый сигнал.
По заданию, модулируемым сигналом является синусоида с частотой 200Гц.
Так же согласно заданию, амплитуда выходных сигналов, должна быть 10В. Нужную амплитуду обеспечивает электронный ключ.
3. Функциональные блоки
3.1 Генератор прямоугольных импульсов
Кварцевый генератор - генератор колебаний, синтезируемых кварцевым резонатором, входящим в состав генератора. Обычно обладает небольшой выходной мощностью.
Внешнее напряжение на кварцевой пластинке вызывает её деформацию. А она, в свою очередь, приводит к появлению зарядов на поверхности кварца (пьезоэлектрический эффект). В результате этого механические колебания кварцевой пластины сопровождаются синхронными с ними колебаниями электрического заряда на её поверхности и наоборот.
Для обеспечения связи резонатора с остальными элементами схемы непосредственно на кварц наносятся электроды, либо кварцевая пластинка помещается между обкладками конденсатора.
Используем Генератор Пирса. В схеме используется минимум компонентов: один цифровой инвертор, один резистор, два конденсатора и кристалл кварца, который действует как высокоизбирательный элемент фильтра.
Генератор с RC частотно-задающей цепью, принцип его работы основан на процессе зарядки-разрядки конденсатора С через резистор R. Через этот резистор осуществляется ООС по постоянному току, а через конденсатор-ПОС по переменному.
Второй инвертор в схеме генератора предназначен для уменьшения длительности фронтов формируемого прямоугольного колебания. Это необходимо для уменьшения влияния последующей схемы на стабильность колебаний задающего генератора, а также для более надёжной работы цифровых счётчиков делителя частоты.

Рисунок 2 – Блок 1. Генератор прямоугольных напряжений
Схема делителя частоты до значения нужной частоты. Для реализации делителя потребуется микросхема 561ИЕ16.
3.2 Генератор линейно изменяющегося напряжения
Этот блок представляет собой генератор треугольного напряжения. В настоящее время генераторы с малым коэффициентом нелинейности (ε<0,0) и слабым влиянием нагрузки на форму выходного напряжения создаются с использованием операционных усилителей.
В частности, распространены генераторы на основе интегратора, управляемого входным импульсом напряжения прямоугольной формы. Элементами схемы являются источник питания, зарядный резистор R 6 , конденсатор С3 и разрядный транзистор VT1. Выходное напряжение генератора представляет собой, усиленное операционным усилителем, напряжение на конденсаторе. ОУ охвачен отрицательной (R 5 и R 9) и положительной (резистор R 10) обратными связями.

Рисунок 3 – ГЛИН
Генератор работает следующим образом. В момент, когда полевой транзистор VT1 закрыт, происходит заряд конденсатора С3 через резисторы R10 и R7. Как только мы подаем импульс на VT1, происходит разряд конденсатора этот полевой транзистор.
3.3 Компаратор
Данный блок представляет собой компаратор, суть работы которого заключается в сравнении двух входящих сигналов, и получении на выходе импульсов различной длительности. На отрицательный вход подаётся опорный сигнал, т.е. «треугольные импульсы», а на положительный - сам модулируемый непрерывный аналоговый сигнал. Частота импульсов соответствует частоте треугольных импульсов. Ту часть периода, которую входной сигнал выше опорного, на выходе получается единица, ниже - нуль.

Рисунок 4 - Компаратор
3.4 Электронный ключ
Для получения на выходе импульсов нужной амплитуды используем транзистор VT2 и элемент «И-НЕ» DD5. Резистор R13 ограничивает ток на вход базы транзистора. Резистор R15 является нагрузкой.

Рисунок 5 – Схема электронного ключа
4. Расчётная часть и выбор элементов схемы
4.1 Расчет генератора импульсов
На рисунке 6 показан генератор, со стоящий из активного элемента – инвертора – и пассивного элемента – кварцевого резонатора.

Рисунок 6 – Кварцевый генератор
Вместо одного инвертора можно поставить любое нечетное количество инверторов.

Рисунок 7 – Эквивалентная схема замещения
Эквивалентная схема кварцевого резонатора показана на рисунке 7.
Генератор Пирса – одна из наиболее популярных схем. Она является основой практически всех генераторов на одном вентиле. Кварц ведет себя как большая индуктивность, так как он подключен параллельно. Роль нагрузки на выход резонатора играют конденсаторы C1 и C2. Конденсаторы C1 и C2 играют роль нагрузочной емкости кварцевого резонатора.
В качестве резонатора выбираем кварцевый резонатор: KX-49 номинальная частота которого - 2.4576 МГц. В таблице 2 приведены параметры кварцевого резонатора.
Таблица 2 Параметры KX-49
| С L | R 1 | C 0 | F |
| 30пФ | 200 Ом | 7пФ | 2,4576 МГц |
Резистор R1 предназначен для автоматического запуска генератора при включении питания. Этот же элемент определяет коэффициент усиления инвертора, и чем больше будет этот коэффициент усиления, тем более прямоугольные колебания будут формироваться на его выходе, а это, в свою очередь, приведёт к снижению тока, потребляемого кварцевым генератором. Выберем номинал резистора R1 равным 1Мом.
Резистор R2 увеличивает импеданс цепи, с тем чтобы вместе с конденсатором C2 увеличить фазовый сдвиг. Это нужно для того, чтобы генератор заработал на нужной, а не на большей частоте. Резистор также изолирует выход инвертора от цепи резонатора и этим сохраняет прямоугольную форму импульса. Номинал резистора должен быть примерно равен импедансу нагрузки Z L , который можно вычислить по приведенной формуле:


Импульсы с частотой f=2,4576 МГц поступают на счетчик ИЕ16, с Q7 выхода счетчика получаем импульсы с частотой f/ 256=9.6 кГц.
4.2 Расчет генератора линейно изменяющегося напряжения
В качестве генератора линейно изменяющегося напряжения выбирается схема на рисунке 5.
Рассматриваемый ГЛИН выполнен на базе интегратора напряжения (DD2, RC- цепь, источник питания U1), управляемого генератором прямоугольных импульсов и источника питания U1. Когда транзистор закрыт, через него протекает неуправляемый (начальный) ток стока. При открытом транзисторе ток через транзистор должен определяться величиной сопротивления нагрузки и напряжением питания.
Когда линейно изменяющееся напряжение Uc(t) на выходе интегратора достигнет значения напряжения срабатывания, происходит подача сигнала управления, под действием которого ключевой транзистор VT1 открывается, разряжая конденсатор. Далее процесс повторяется с периодом:
Задаемся частотой раной 9,6 кГц.
Напряжение Ucm целесообразно выбирать минимальным, чтобы исключить влияние разброса параметров используемых резисторов на коэффициент нелинейности формируемого напряжения.
Максимальное напряжение на конденсаторе связано с длительностью зависимостью
![]() t
t
Выбираем U1 = 5В, U2=0В, тогда Ucm = 5В.
Выбираем R 6 = R 5 = 10 кОм,тогда С 3 = 96нФ.
Исходя из следующего, найдем R9.





Uвых = 10 В, тогда:R 9 = Ucmax*R 6 / Uвых = 5*10000/10≈ 2 кОм, берем ближайшее по номиналу
R 9 = R 10 =2 кОм
В качестве ОУ DD3 выбран 140УД7. Питание ±10В.
4.3 Выбор компаратора
В качестве компаратора DD4 используется 521СА3 для обеспечения стабильной работы ШИМ.
Технические характеристики аналогового компаратора 521СА3
 Аналог LM111
Аналог LM111
Входной ток не более 100 нА
Коэффициент усиления не менее 200000
Ток нагрузки до 50 мА
Питание +5...+30 или ±3...±15 В
Области применения
 Детекторы пересечения нуля
Детекторы пересечения нуля
Детекторы перенапряжений
Широтно-импульсные модуляторы
Прецизионные выпрямители
Аналого-цифровые преобразователи
Резистор R12 в сочетании с диодами D1 и D2 ограничивает размах входного сигнала. Благодаря диодам в ограничиваем размах входного напряжения значениями -12,6 В до +12,6 В, условие состоит в том, что отрицательное входное напряжение не должно достигать значения напряжения пробоя (например, для диода типа КД510А это значение составляет - 50 В).
Таблица 3 Параметры выбранного транзистора
| Наимен. | U обр. ,В | I пр. max, A | I обр. max, мкА | F d max, кГц |
| КД510А | 50 | 0.2 | 5 | 200000 |
4.4 Расчет электронного ключа
В качестве ключа выбирается следующая схема:

Рисунок 9 – Схема электронного ключа
Rн =0,5 к Ом, Uвых =10В.
Iк=Uвых/Rн=10/500=50mА
По справочнику ищем транзистор, который выдержит заданный ток коллектора (0,05А). Транзистор КТ315А держит постоянный ток до 0,1 А.
Из справочника - h21э, для КТ315А
Считаем базовый ток Iб=Ik/h21э=0.05/30≈ 1,67 mA, на базу надо подводить ток не ниже 167 мкА.
R14 – согласующее сопротивление между компаратором DD3 и транзистором VT2. Выберем R16 = 200 Ом.
R вых =R 15 =500 Ом по заданию, из ряда выбираем 510 Ом. на выходе необходимо получить 10 В, тогда рассчитаем величину резистора R 14
(U пит -U вых)/R 14 =U вых /R 15 ,
откуда R 14 =2R 15 /10=102 Ом, из стандартного ряда выбираем номинал 100 Ом. Рассеиваемая мощность 10В*1.25mA≈0,0125 Вт
Таблица 4. Параметры выбранного транзистора КТ315А
5. Моделирование схемы
Выходной сигнал с генератор треугольных импульсов:

Выходной сигнал с генератора прямоугольных импульсов:

Моделируемый сигнал:

Процесс модуляции:


Период выходного сигнала:

Наименьшая длительность импульса:

Длительность должна быть равна 5,12 мкс. По графику видно, что она составляет 5,56мкс.
Наибольшая длительность импульса:

Длительность импульса должна составлять 97,37мкс. По графику видно, что она равна 97,74 мкс.
Заключение
В данной курсовой работе разработали принципиальную схему и произвели расчет схемы Широтно-Импульсного модулятора. На вход устройства ШИМ подается синусоида с частотой согласно заданию – 200 Гц, на выходе имеем преобразованный ШИМ сигнал, амплитуда которого 10 В. Диапазон изменения относительной длительности выходных импульсов данного ШИМ составляет – 0.05 ÷ 0.95. Разработанный широтно-импульсный модулятор является достаточно простым. Моделирование схемы производили с помощью пакета CircuitMaker.
Список использованной литературы
1. Альтшуллер Г.Б., Елфимов Н.Н., Шакулин В.Г. Кварцевые резонаторы: справочное пособие. М.:Радио и связь, 1984.-232с., ил.
2. Хорвиц П., Хилл У. Искусство схемотехники: Пер. с англ. – Изд. шестое. М.: Мир, 2001.
3. Лекционный курс по ЭЦиМС (преподаватель Андреев И.Б.).
4. Цифровые КМОП микросхемы, справочник, Партала О.Н. – СПб: Наука и техника, 2001. - 400 стр. с ил.
5. Л. Лабутин, Кварцевые резонаторы. - Радио, 1975, №3.
6. Генераторы прямоугольных импульсов на микросхемах КМОП. В. Стрижов,Схемотехника, 2000, № 2, стр. 28
7. Забродин Ю.С., Промышленная электроника: учебник для вузов. - М.: Высш. Школа, 1982. – 496с., ил.